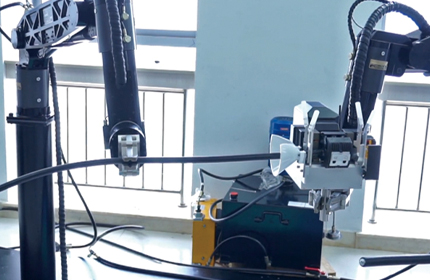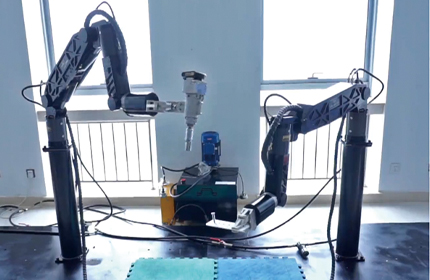






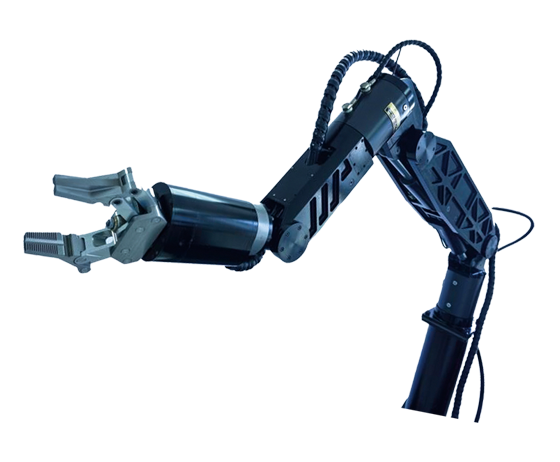
RoboArm液壓機械臂
● 旋轉關節(jié)×6 + 末端夾手
● 高精度
● 液壓伺服驅動
● 負載自重比大于1
● 抗電磁干擾強
● 防護等級高





● 旋轉關節(jié)×6 + 末端夾手
● 高精度
● 液壓伺服驅動
● 負載自重比大于1
● 抗電磁干擾強
● 防護等級高
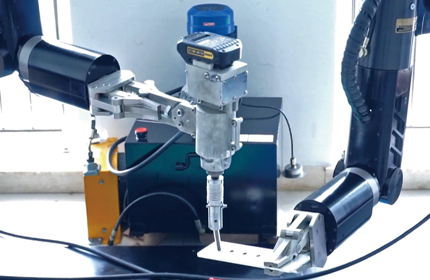
● 與機械臂同構
● 結構輕巧緊湊,方便攜帶
● 遠距離控制機械臂的關節(jié)運動
● 根據機械臂端的工作負載大小
● 向操作者提供相應的臨場力覺反饋


應用于復雜惡劣,或不適合作業(yè)人員直接進入的環(huán)境中,如:
● 帶電作業(yè)場合
● 水下作業(yè)場合
● 礦井作業(yè)場合
● 核電作業(yè)場合 … …