






12月18-19日,第六屆中國機器人行業(yè)年會在杭州隆重舉行。本次大會聚焦人形機器人、具身智能、工業(yè)機器人及核心零部件等前沿議題,旨在擘畫行業(yè)新藍圖、凝聚前沿共識,驅(qū)動機器人產(chǎn)業(yè)邁向智能化、協(xié)同化的新未來。
優(yōu)寶特機器人作為行業(yè)矚目的創(chuàng)新力量,受邀出席本次盛會,并與眾多領(lǐng)軍企業(yè)共話技術(shù)趨勢、共享實戰(zhàn)經(jīng)驗,共同推動具身智能機器人產(chǎn)業(yè)邁向高質(zhì)量、可持續(xù)發(fā)展的新階段。2025年,優(yōu)寶特機器人憑借全棧技術(shù)的持續(xù)突破,在四足及人形機器人領(lǐng)域展現(xiàn)出強勁的發(fā)展動能,贏得行業(yè)廣泛贊譽。在大會頒獎環(huán)節(jié),優(yōu)寶特一舉斬獲LeadeRobot 2025年度中國具身智能時代新星榜TOP50、LeadeRobot2025年度性能卓越獎、“LeadeRobot2025年度中國機器人行業(yè)影響力人物”多項榮譽,進一步鞏固了其在具身智能領(lǐng)域的領(lǐng)先地位和品牌影響力。
2025年,具身智能機器人產(chǎn)業(yè)迎來爆發(fā)式增長,進入技術(shù)迭代、場景拓展與生態(tài)共建的關(guān)鍵時期。憑借十余年腿足式機器人研發(fā)經(jīng)驗的積淀,優(yōu)寶特以扎實的技術(shù)底蘊與清晰的戰(zhàn)略規(guī)劃,穩(wěn)步推進產(chǎn)品與生態(tài)布局。
優(yōu)寶特榮獲
2025年度中國具身智能時代新星榜TOP50
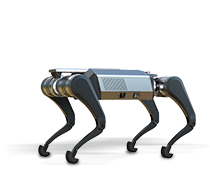
在四足機器人方向,優(yōu)寶特依托卓越的高動態(tài)運動性能、強大的環(huán)境適應(yīng)能力及多元化運動的模式,突破傳統(tǒng)工業(yè)應(yīng)用邊界,深入拓展軍警安防、應(yīng)急救援、電力巡檢等高價值場景;結(jié)合Ai賦能的智能巡檢系統(tǒng),公司與行業(yè)龍頭企業(yè)開展深度協(xié)同,共同構(gòu)建開放共贏的產(chǎn)業(yè)生態(tài),推動關(guān)鍵領(lǐng)域的智能化升級與安全效能全面提升;同時,積極參與并推動四足機器人標準化體系建設(shè),助力行業(yè)健康有序發(fā)展。
在人形機器人領(lǐng)域,優(yōu)寶特加速“關(guān)節(jié)模組-機器人本體-運控小腦-智慧大腦”全棧自研技術(shù)迭代,構(gòu)建從環(huán)境感知到動作執(zhí)行的端到端智能閉環(huán),逐步實現(xiàn)從運動步態(tài)到復(fù)雜場景作業(yè)的“具身智能體”演變。如今,公司也持續(xù)贏得資本的青睞,正加速技術(shù)落地與產(chǎn)業(yè)化進程。
人形機器人走向?qū)嵱没暮诵模谟谄溥\動、感知和交互能力的全面提升。自2014年開始,優(yōu)寶特便致力于高性能腿足式機器人研究,在行走穩(wěn)定性、復(fù)雜地形適應(yīng)、手腦協(xié)調(diào)等關(guān)鍵技術(shù)上取得系列突破,先后突破高功率密度機載液壓動力系統(tǒng)、自主感知與導(dǎo)航、強化學(xué)習(xí)等難題。
優(yōu)寶特榮獲
2025年度人形機器人性能卓越獎
如今,通過深化“大腦-小腦”協(xié)同的全棧技術(shù)架構(gòu),公司在強化學(xué)習(xí)、運動控制、視覺語言模型等算法持續(xù)優(yōu)化,實現(xiàn)了從自研關(guān)節(jié)執(zhí)行器、高算力嵌入式平臺到感知-決策-控制的全鏈路閉環(huán)。此外,依托多傳感器融合的數(shù)據(jù)采集系統(tǒng)與光學(xué)動作捕捉設(shè)備,優(yōu)寶特構(gòu)建了覆蓋多地形、多任務(wù)的機器人運動數(shù)據(jù)庫,為算法演進與場景適配提供強有力支撐。其人形機器人可以更加可靠、順滑的完成舞蹈、武術(shù)等復(fù)雜的序列動作,實現(xiàn)自然的交互引導(dǎo)。
優(yōu)寶特機器人董事長范永榮獲“2025年度中國機器人行業(yè)影響力人物”,實至名歸。在年會現(xiàn)場,范永分享了對腿足式機器人領(lǐng)域長達十余年的研究心得與產(chǎn)業(yè)思考:“機器人的核心基礎(chǔ)在于高功率密度關(guān)節(jié)驅(qū)動與仿生機構(gòu)設(shè)計,優(yōu)寶特通過“驅(qū)-傳-感-控”一體化關(guān)節(jié)集成與先進行控制算法,構(gòu)建了高性能腿足機器人平臺。通過不斷優(yōu)化多步態(tài)全身控制、強化學(xué)習(xí)等運動策略,并結(jié)合多模態(tài)大模型驅(qū)動的VLA技術(shù),賦能機器人更智能的移動與作業(yè)能力。”
談及具身智能機器人未來,他表示:“在技術(shù)加速迭代的時代,優(yōu)寶特將持續(xù)聚焦機器人本體、核心部件與大模型等關(guān)鍵技術(shù)研發(fā),推動會產(chǎn)業(yè)鏈協(xié)同創(chuàng)新,深耕行業(yè)場景,以開放、合作的心態(tài),迎接具身智能全面落地的新時代。”