






本文章轉(zhuǎn)載自3D視覺(jué)工坊
0、步態(tài)規(guī)劃
四足機(jī)器人控制當(dāng)中,步態(tài)是至關(guān)重要的一項(xiàng)。我們可以簡(jiǎn)單理解成四足機(jī)器人運(yùn)動(dòng)過(guò)程中各腿的狀態(tài),在這套設(shè)計(jì)方案中,我們對(duì)步態(tài)的規(guī)劃主要分成兩大主要部分,即接觸狀態(tài)和周期函數(shù)。而步態(tài)規(guī)劃的目的,就是創(chuàng)建一個(gè)關(guān)于的足端接觸狀態(tài)的周期函數(shù)。
1、接觸狀態(tài)
四足機(jī)器人行進(jìn)過(guò)程中,根據(jù)足端與地面是否發(fā)生接觸,我們可以規(guī)定各條腿的兩種接觸狀態(tài),即接觸(contact)與擺動(dòng)(swing)
總控制器會(huì)根據(jù)步態(tài)規(guī)劃給出的狀態(tài),移交至對(duì)應(yīng)的控制器去處理,即擺動(dòng)腿控制器(swing leg controll),接觸腿控制器(contact leg control)。
對(duì)于這兩種狀態(tài),可以簡(jiǎn)單地用一個(gè)布爾類型的值s來(lái)定義,即

對(duì)于周期性的步態(tài)規(guī)劃,我們可以用下標(biāo)Φ來(lái)進(jìn)行區(qū)分,可以寫成:

2、步態(tài)周期
四足機(jī)器人的運(yùn)動(dòng)歸根到底都是周期運(yùn)動(dòng),我們無(wú)須量化機(jī)器人運(yùn)動(dòng)的整個(gè)過(guò)程,因此如何量化定義一個(gè)完整的步態(tài)周期顯得極為重要,在此我們使用基于時(shí)間的周期函數(shù),定義一個(gè)基準(zhǔn)相位值,公式如下:
其中,
· t:當(dāng)前運(yùn)行時(shí)間
· t0:當(dāng)前周期開始時(shí)間
· T:一個(gè)步態(tài)周期
同樣我們可以利用取余的方法來(lái)簡(jiǎn)化上述周期函數(shù),兩者并無(wú)實(shí)質(zhì)的區(qū)別:
其中,
· %為取余運(yùn)算
· T為當(dāng)前運(yùn)行時(shí)間
對(duì)于相同類型的周期信號(hào),我們可以利用相位差來(lái)表征周期函數(shù)之間的差別,因此有了基準(zhǔn)相位函數(shù)之后,我們就可以利用其來(lái)定義各條腿的相位,如下式:
其中,Φi,offset為第條腿與基準(zhǔn)相位的相位差。
3、周期函數(shù)效果演示
這里簡(jiǎn)單利用一個(gè)線性函數(shù)進(jìn)行演示:
取a=1,b=1,其圖像隨時(shí)間變化如下:
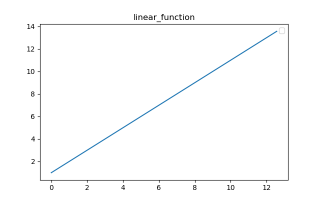
利用周期函數(shù)對(duì)時(shí)間進(jìn)行調(diào)整,可以使其變成周期函數(shù),設(shè)定周期為2s,時(shí)長(zhǎng)為10s,其圖像如下:
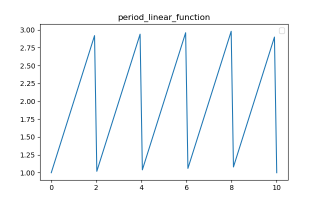
從圖像可以看出,剛好為5個(gè)周期,一個(gè)周期為一個(gè)尖角。接下來(lái),為更好的觀察各曲線相位,我們?cè)O(shè)定該直線函數(shù)的3個(gè)周期,其相位差(offset)分別為[0,1,3,4],圖像如下:
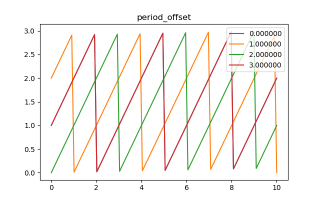
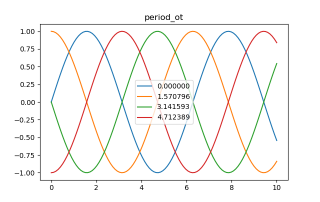
從上圖可以看出,我們的“尖角”會(huì)根據(jù)相位差,向前或向后平移。此方法對(duì)所有函數(shù)均適用,以下為利用sin函數(shù)進(jìn)行的測(cè)試效果:
4、步態(tài)規(guī)劃
因?yàn)槲覀兊乃淖銠C(jī)器人足端,是在不停地與地面接觸,懸空(擺動(dòng)),所以這里說(shuō)的步態(tài)規(guī)劃,其實(shí)指的的一個(gè)連續(xù)(離散)時(shí)間上的接觸序列。
我們以一條腿為例,本質(zhì)上,可以看作是一個(gè)周期性的,用于生成各腿接觸狀態(tài)的階躍函數(shù)。其輸入值為時(shí)間,輸出值為0或1,函數(shù)可以表示成如下:
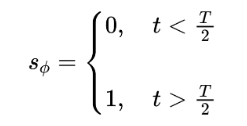
其中t=t%T為時(shí)間的周期函數(shù),其圖像如下所示:
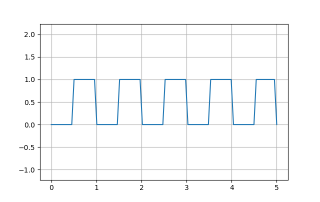
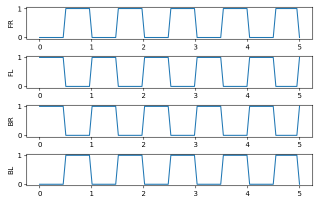
可以看出,步態(tài)規(guī)劃器給出的是一段由0-1組成的接觸序列。接下來(lái)加上相位關(guān)系。以tort步態(tài)為例,其相位為[0, 0.5, 0.5, 0],步態(tài)規(guī)劃隨時(shí)間的圖像如下所示:
5、總結(jié)
綜上,我們利用階躍函數(shù)得到一串由0和1組成的序列,來(lái)表示四足機(jī)器人足端與地面的接觸狀態(tài)。根據(jù)不同的接觸狀態(tài),再交由其他運(yùn)動(dòng)控制器進(jìn)行控制,如接觸狀態(tài),就由mpc模型計(jì)算出所需要的反作用力;而擺動(dòng)狀態(tài),就交由擺動(dòng)控制模塊計(jì)算足端的擺動(dòng)軌跡,最后根據(jù)需要的不同的行走姿態(tài),確定個(gè)條腿之間的相位差,實(shí)現(xiàn)各腿的協(xié)同運(yùn)動(dòng)。

山東優(yōu)寶特智能機(jī)器人有限公司(簡(jiǎn)稱“優(yōu)寶特機(jī)器人”)是山東省政府引進(jìn)的高科技企業(yè)。公司核心團(tuán)隊(duì)具有山東大學(xué)、中國(guó)科學(xué)院自動(dòng)化所等知名院校背景,長(zhǎng)期進(jìn)行人工智能、特種機(jī)器人研究與開發(fā)。公司入選山東省“泰山產(chǎn)業(yè)領(lǐng)軍人才計(jì)劃", “濟(jì)南市引進(jìn)海內(nèi)外高層次創(chuàng)業(yè)人才計(jì)劃”。獲“國(guó)家級(jí)高新技術(shù)企業(yè)”、“山東省專精特新中小企業(yè)”、山東省創(chuàng)新型中小企業(yè)“濟(jì)南市瞪羚企業(yè)”等榮譽(yù)。是應(yīng)急管理部煤礦機(jī)器人協(xié)同創(chuàng)新中心、礦山機(jī)器人創(chuàng)新應(yīng)用聯(lián)盟、山東院士專家聯(lián)合會(huì)人工智能與機(jī)器人專業(yè)委員會(huì)、山東省教育廳機(jī)器人與智能系統(tǒng)協(xié)同創(chuàng)新中心、山東省自動(dòng)化學(xué)會(huì)等組織的成員理事單位。
公司致力于腿足式仿生機(jī)器人和液壓特種機(jī)器人產(chǎn)品開發(fā),產(chǎn)品已應(yīng)用于煤礦、電力、石化、教育等行業(yè)。申報(bào)并承擔(dān)國(guó)家級(jí)項(xiàng)目2項(xiàng)、省部級(jí)項(xiàng)目2項(xiàng)。項(xiàng)目“電動(dòng)四足機(jī)器人關(guān)鍵技術(shù)及應(yīng)用”獲山東省技術(shù)發(fā)明獎(jiǎng)二等獎(jiǎng)。公司榮獲第十一屆中國(guó)創(chuàng)新創(chuàng)業(yè)大賽山東賽區(qū)“科創(chuàng)之星”稱號(hào)。
公司申請(qǐng)專利50多件,已經(jīng)授權(quán)發(fā)明專利12件、實(shí)用新型專利3件。獲“第四屆山東省專利獎(jiǎng)二等獎(jiǎng)”。