






本文轉載自機器人技術與應用

本文來自于第八屆中國機器人峰會上譚建榮院士題為《機器人設計及其數字孿生:關鍵技術與發展趨勢》的報告。
▍ 一、研究背景與研究意義
智能制造是高端裝備制造業發展的必然趨勢,也是促進我國從制造大國向制造強國轉變的必然之路。談及智能制造就繞不開工業機器人,作為我國智能制造發展的重要內容之一,工業機器人也是推動中國制造向機械化、自動化、集成化與智能化發展的關鍵。
1.2 工業機器人:制造業再認識
1.3 機器人創新設計的七個方面
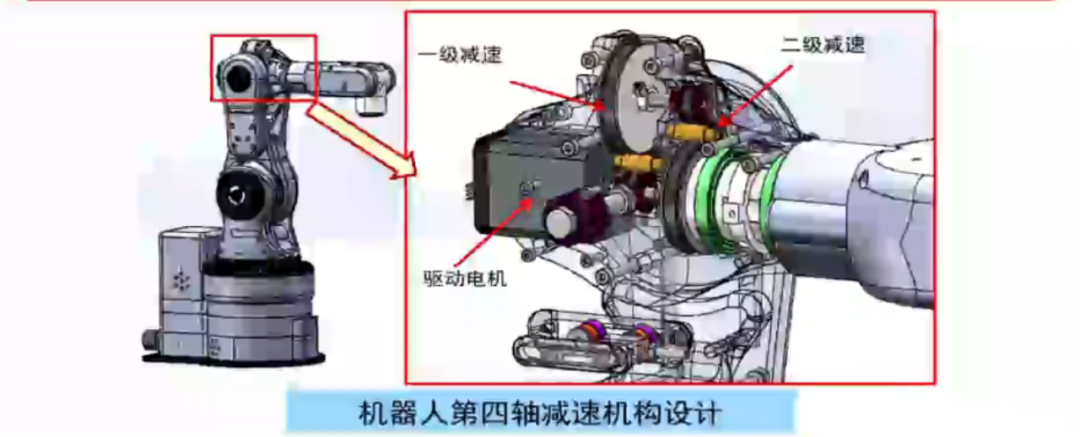
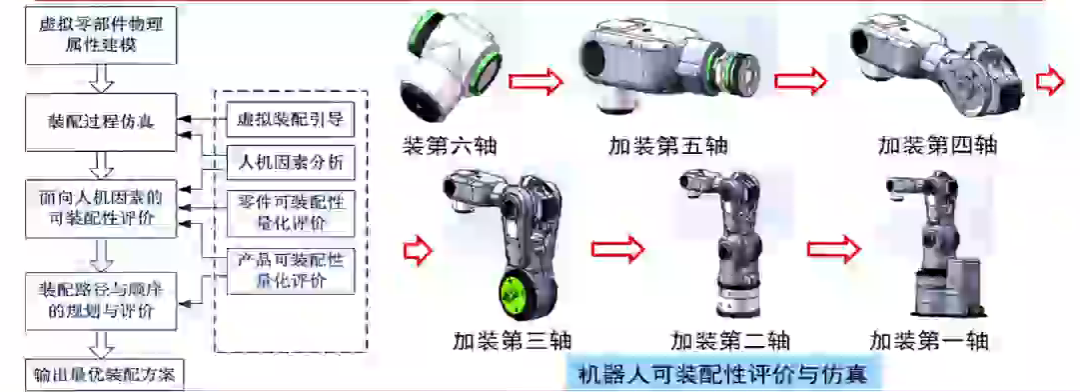
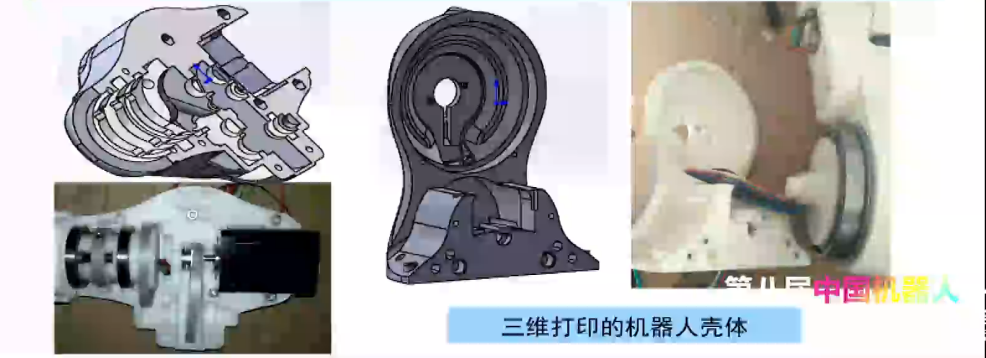
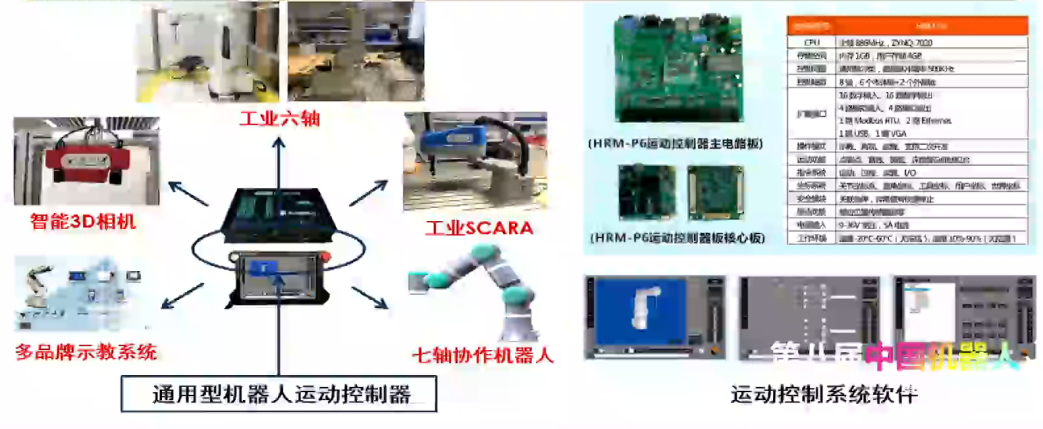
通過突破機器人本體設計與開發的各技術環節,構建機器人本體,結合機器人運動控制技術、機器人作業規劃與示教技術的研究,開發工業機器人的軟硬件成套系統。在實現支持多品牌機器人示教編程的同時,降低整機的系統成本。其中包括:關節減速機構設計、內部散熱系統設計、機器人本體的可裝配性分析、機器人本體3D打印制造、機器人高性能通用控制系統設計。
(1)關節減速機構設計


此外,協作工業機器人運動算法的提出,實現協作機器人運動控制算法庫的創建。其中包括機器人正逆運動學和動力學、關節空間和笛卡爾空間的直線圓弧軌跡規劃、帶過渡段的連續軌跡規劃、時間最優軌跡規劃和外部軸算法等。
2.4 機器人視覺感知與自主學習
通過智能學習算法實現了機器人的自主操作(圖7),獨立自主完成抓取、裝配、搬運等作業活動。
圖7 機器人自主操作
基于機器學習的工業機器人視覺理解,通過深度學習、強化學習、遷移學習等手段,構建工業機器人視覺理解數學模型,對視覺感知系統獲取的圖像內容進行理解,實現工業機器人作業過程中目標提取、類別識別等任務。
基于視覺反饋的工業機器人測量定位,提出了基于三維結構光的機械臂抓取位置檢測方法(圖8),采用深度信息替代彩色圖中的藍色通道,基于卷積神經網絡的柵格化計算目標工件抓取位置,通過多尺度輸出,應對不同尺寸的抓取位置檢測。
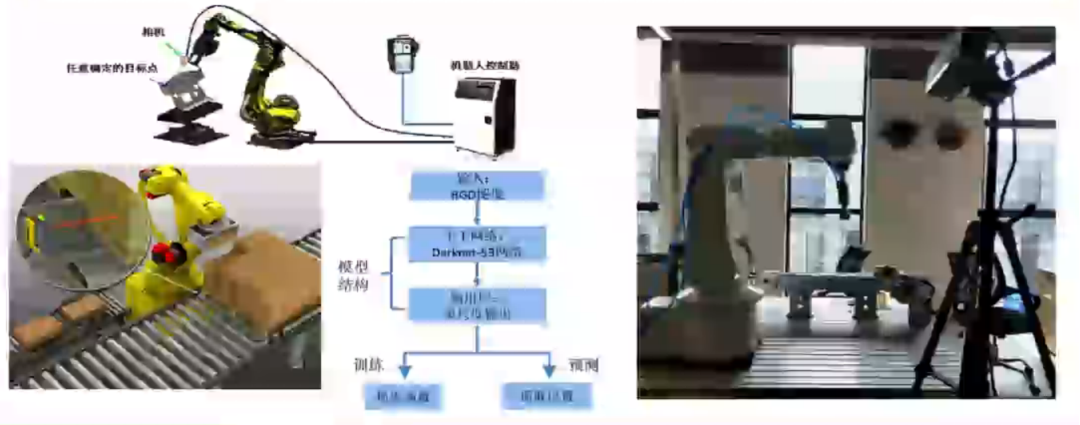
圖8 基于三維結構光的機械臂抓取位置檢測方法
基于卷積神經網絡的機器人最佳抓取位置預測(圖9),提出了基于RGBD圖像信息的機器人抓取位置學習預測方法,構建卷積神經網絡計算不同抓取窗口的抓取概率,將計算所得最大概率的窗口選定為物體最佳抓取位置,從而準確預測不同物體的最佳抓取位置。
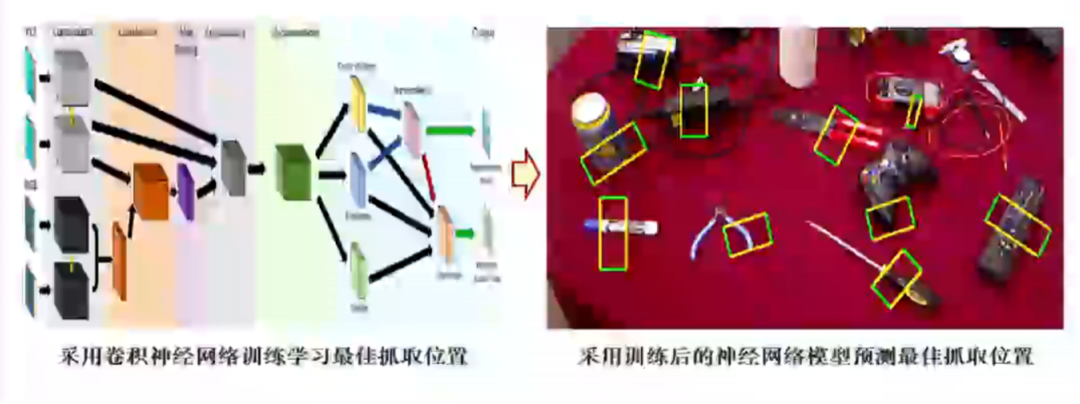
圖9 基于卷積神經網絡的機器人最佳抓取位置預測
圖10所示為工業機器人作業行為強化學習技術,工業機器人以“試錯”的方式對其作業行為進行學習,通過與環境交互獲得的獎賞來指導行為,從而使其獲得最大的獎賞。強化學習中由環境提供的強化信號是對產生動作好壞做出的一種評價,而不是告訴系統如何去產生正確動作。
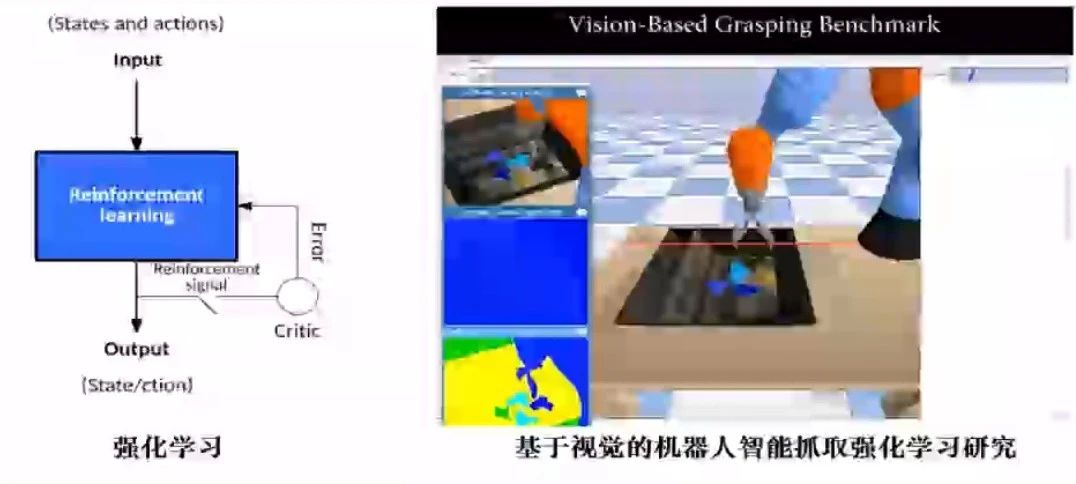
圖10 機器人作業行為強化學習技術
2.5 機器人職業規劃與布局設計
優化機器人布局應該滿足兩個條件:不僅能使機器人末端執行器以合理的姿態到達指定的空間位置,而且能使機器人完成任務的工作周期時間盡量短。然而,機器人工作站布局設計與作業規劃存在一定的復雜性,通過研究發現,存在多種可行的作業拓撲順序,當需要完成某項作業時,能夠有多種方案。例如弧焊作業時,各條焊縫的焊接順序可以變化(圖11)。
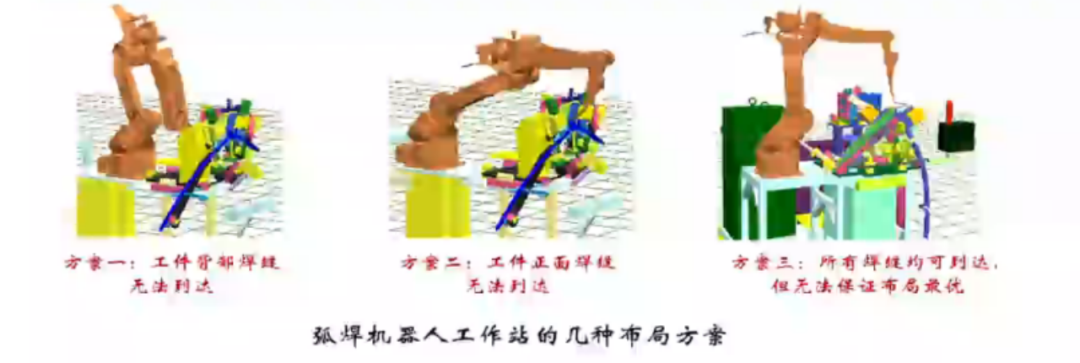
圖11 弧焊機器人工作站的幾種布局方案
其次,機器人基座位置和作業拓撲順序相互耦合,共同影響機器人工作時間。針對這一難點,提出基于蟻群算法的作業順序規劃與機器人布局協同優化方法,解決機器人的作業規劃問題。一是提出廣義逆可達工作空間相容性檢測方法,快速建立機器人基座解空間;二、是提出機器人基座可行解空間離散網絡的作業順序蟻群優化算法,實現具有相同最優作業順序的基座解空間劃分;三是采用模式搜索算法,實現作業順序確定條件下的機器人布局設計。
2.6 工業機器人虛擬示教與數字孿生
通過虛實交互反饋,在同一個界面下調用、使用多類型機器人的示教界面(圖12)。通過集成構建ABB、發那科(FANUC)、安川、庫卡等多個品牌機器人的編程器模擬界面,用戶可以通過虛擬編程器的操作,進行相應虛擬和實體機器人的控制及相關功能操作,實現工業機器人的虛擬示教。

圖12 多類型機器人的虛擬示教界面
在這個基礎上,初步實現工業機器人數字孿生遙操作技術(圖13),基于主動引導的虛擬環境中接觸力覺連續生成方法,通過數字孿生實現真實機器人的力反饋遙操作,使操作人員更真實地感知遠程機器人操作對象,輔助操作人員更精準、便捷地完成操作任務。
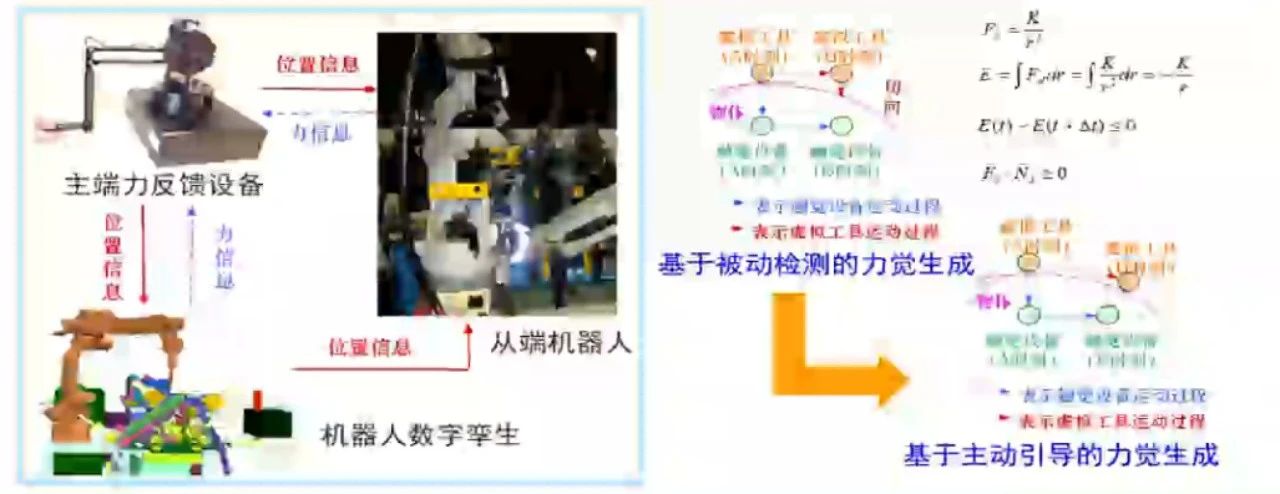
圖13 數字孿生遙操作技術
數字孿生環境下的機器人視覺伺服運動規劃技術(圖14),通過構建工業機器人作業的數字孿生環境,基于深度強化學習訓練混合視覺伺服控制器,得到作業任務的最優運動方案,實現機器人運動的多約束自主規劃。
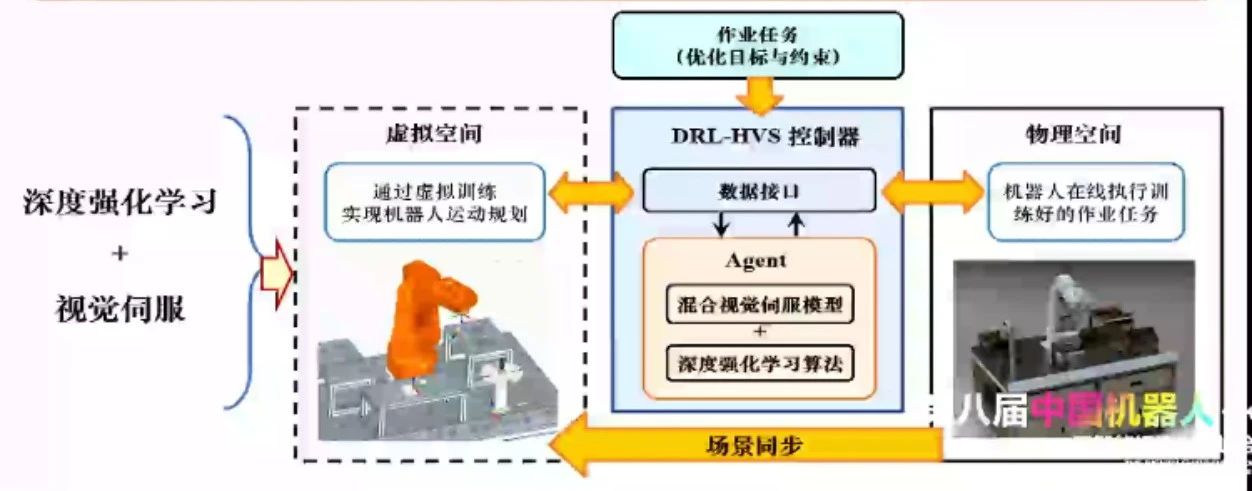
圖14 機器人視覺伺服運動規劃技術
基于增強現實的工業機器人維修導航技術(圖15),通過增強現實的數字孿生可視化虛實交互技術,實現工業機器人維修維護操作智能導航,將當前維修任務的工藝文件以虛擬維修指令的形式,引導維修人員進行故障處理,有效地提高工業機器人的維修維護效率。

圖15 工業機器人維修操作導航
三、工業機器人應用實例
浙江大學等設計研發了具有自主知識產權的HRT系列四軸、六軸、七軸工業機器人本體系統及高性能通用控制系統,覆蓋教育和工業應用領域(圖16)。其中,筆者團隊自主開發了一個機器人集成工作站,該小型工作站可以在工作站里形成有序的物流,有序的算法的驗證。
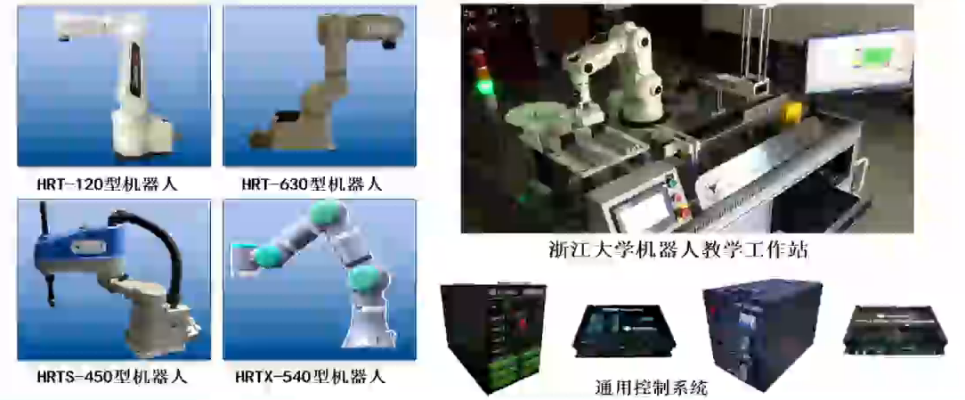
圖16 工業機器人本體系統、通用控制系統、機器人教學工作站
采用基于時空連續性的多機器運動干涉實時檢測(圖17)、基于智能計算的裝備生產線布局多約束優化、基于虛擬人操作的任務工作流建模與求解(圖18)等方法,解決了焊縫不可達和焊接干濕的問題,最終提高了裝備生產線的設計(圖19)效率、設計質量,縮短了裝備生產線的開發周期。
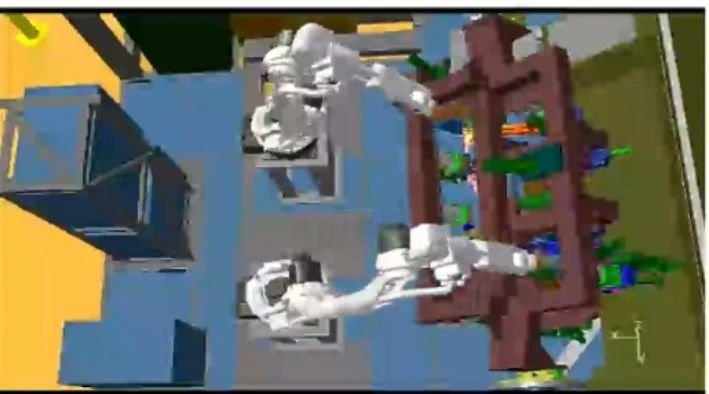
圖17 基于時空連續性的多機器人運動干涉實時檢測

圖18 基于虛擬人操作的任務工作流建模與求解

圖19 寧波信泰福特Focus車門焊接線設計
車輛齒盤堆焊(圖20)要求在一個工位上實現齒盤焊接后直接形成符合設計要求的齒面,并集成上下料、焊接、檢測、碼垛等多項功能。在此過程中,如何確定影響齒盤表面多層堆焊質量的主要焊接工藝參數及其取值方案,如何考慮工裝設計與工藝流程設計、生產線規劃的協同優化,如何實現搬運與焊接機器人的協同作業,以及與外圍自動化輔助設備的控制集成,成為主要的技術難點。
圖20 車輛齒盤堆焊
浙江大學設計研發了面向多品牌工業機器人的虛擬示教編程系統(圖21),通過構建不同品牌示教器與單一機器人本體間的映射關系,實現多品牌工業機器人一體化示教。虛擬示教可以通過人、機器人在同樣虛擬的界面下進行人機對話,學習到機器人如何編程。

圖21 多品牌虛擬示教器及虛擬示教編程系統
除此之外,一系列從正向設計到創新設計的關鍵技術與應用:超大型低能耗大型空分裝備設計制造技術,高檔數控機床數字化正向設計的關鍵技術,大噸位深拉伸液壓裝備設計制造關鍵技術,一類高端龍門加工中心創新設計關鍵技術,電梯大批量定制設計與數字化智能化技術,數控機床遠程監控、診斷與虛擬維修技術,大型艦船分段制造的作業模擬與優化技術,機器人作業布局規劃與智能制造應用技術,重大裝備產品性能設計、計算與仿真技術,數字化裝配關鍵技術在航天產品中的應用等,幫助一批企業實現了數字化轉型。
綜上所述,筆者認為,工業機器人對于我國智能制造的發展有著舉足輕重的作用,筆者帶領的團隊在相關項目研發上得到黨和國家領導人的高度重視。在從“制造大國”向“制造強國”邁進的道路上,需要各方力量協同合作、久久為功。加快培養人才尤其是具有全球競爭力的高層次人才,不斷激發出其巨大的創新能量,推動“中國制造”走向“中國智造”,為全面建設社會主義現代化國家、全面推進中華民族偉大復興提供強大支撐、貢獻更大力量。

山東優寶特智能機器人有限公司(簡稱“優寶特機器人”)是山東省政府引進的高科技企業。公司核心團隊具有山東大學、中國科學院自動化所等知名院校背景,長期進行人工智能、特種機器人研究與開發。公司入選山東省“泰山產業領軍人才計劃", “濟南市引進海內外高層次創業人才計劃”。獲“國家級高新技術企業”、“山東省專精特新中小企業”、山東省創新型中小企業“濟南市瞪羚企業”等榮譽。是應急管理部煤礦機器人協同創新中心、礦山機器人創新應用聯盟、山東院士專家聯合會人工智能與機器人專業委員會、山東省教育廳機器人與智能系統協同創新中心、山東省自動化學會等組織的成員理事單位。
公司致力于腿足式仿生機器人和液壓特種機器人產品開發,產品已應用于煤礦、電力、石化、教育等行業。申報并承擔國家級項目2項、省部級項目2項。項目“電動四足機器人關鍵技術及應用”獲山東省技術發明獎二等獎。公司榮獲第十一屆中國創新創業大賽山東賽區“科創之星”稱號。
公司申請專利50多件,已經授權發明專利12件、實用新型專利3件。獲“第四屆山東省專利獎二等獎”。